
Spine:腰椎术中应用3D导航可减少辐射暴露
2014-06-12 伊文 丁香园
手术图像导航系统在上世纪90年度初用于脑外科手术,并很快用于脊柱手术。第一根导航下的椎弓根钉于1995年植入,之后,脊柱内固定导航的应用得以缓慢但稳步发展,今年来已成为常规。 已有研究表明,导航下椎弓根植入的位置更为精确。尽管导航下植入椎弓根钉有减少神经损伤的趋势,但导航系统在对患者的临床利益方面,尚未明确。除置钉的精确性方面,导航另一可能的优点为减少术中辐射暴露。尽管术中辐射暴露对患者而言
手术图像导航系统在上世纪90年度初用于脑外科手术,并很快用于脊柱手术。第一根导航下的椎弓根钉于1995年植入,之后,脊柱内固定导航的应用得以缓慢但稳步发展,今年来已成为常规。
已有研究表明,导航下椎弓根植入的位置更为精确。尽管导航下植入椎弓根钉有减少神经损伤的趋势,但导航系统在对患者的临床利益方面,尚未明确。除置钉的精确性方面,导航另一可能的优点为减少术中辐射暴露。尽管术中辐射暴露对患者而言是单一事件,但对手术医生而言,却存在累积效应,可能增加医生罹患癌症的风险。
德国慕尼黑工业大学神经外科的学者们进行了一项前瞻性随机研究,结果表明,腰椎内固定手术中应用导航系统可减少手术医生和患者的辐射暴露,文章于2014年6月发表在Spine上。【原文下载】
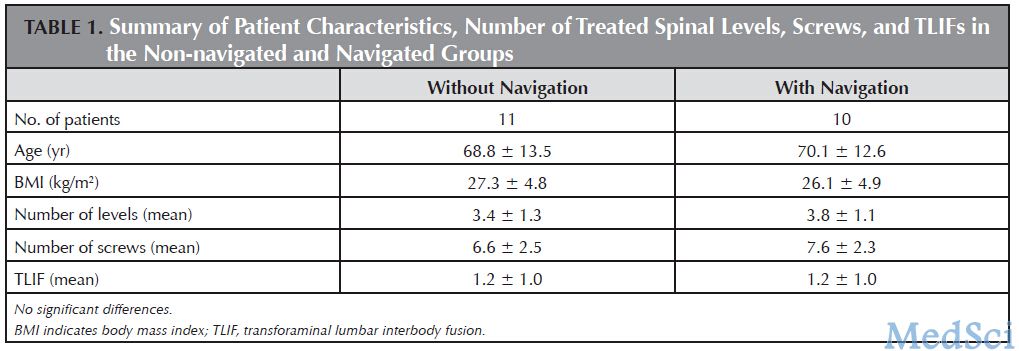
该研究纳入的病例为21例连续病例,行下胸椎或腰椎TLIF内固定术,随机分为导航组(10例)和非导航徒手置钉组(11例),两组病例在年龄,性别,体重指数和手术节段方面平等无统计差别(表1)。导航系统为3D图像导航,依据棘突作为参考矩阵,指导椎弓根钉置钉,导航系统登记定位后即无须再透视。
表1导航组和徒手组病人一般情况
(点击可放大)

图1导航组和徒手组患者和手术医护人员的辐射暴露
使用数字放射量测定器评估手术医生的辐射暴露剂量,探头分别置于优势前臂,眼部和胸部铅衣外测定辐射暴露。椎弓根钉植入后测算一次,归零后再测算cage植入的剂量(图2)。患者的累计辐射剂量于手术结束时从C型臂计算得出。

图2 数字放射量测定器置于优势前臂、眼部、胸部铅衣外
结果表明,手术医生累计辐射剂量,徒手组为导航组的9.96倍。患者的累计辐射剂量,徒手组较导航组高,但无统计学差异(1884.8 cGy·cm2对887 cGy·cm2)(表2)。
表2导航组和徒手组在椎弓根置钉和cage植入时的胸部、手、眼部辐射剂量

(点击可放大)
以上结果表明,导航系统能大大减少手术医生的辐射暴露剂量,辐射主要源自术前定位、3D图像获取前的C型臂放置及定位。而且,神经定位亦可减少患者的累计辐射剂量。
本研究首次通过临床随机分类的方法,比较了传统C型臂电视X光机和3D图像导航系统,手术医生和患者辐射剂量的差异。
根据德国职业辐射暴露的年度极限(对于胸部而言),传统的徒手法,允许每名手术医生每年最多植入7895根椎弓根钉。但胸部在铅衣的保护下,辐射剂量于铅衣外测得,那么对眼部而言,极限量为每年10714根椎弓根钉。
尽管目前的手术量离极限量距离甚远,但持续低剂量辐射对人体的危害,尚未明确。而3D导航确能明显减少这种累积的辐射剂量,对医生和患者,均为福音。
原始出处:
Villard J1, Ryang YM, Demetriades AK, Reinke A, Behr M, Preuss A, Meyer B, Ringel F.Radiation Exposure to the Surgeon and the Patient During Posterior Lumbar Spinal Instrumentation: A Prospective Randomized Comparison of Navigated Versus Non-navigated Freehand Techniques.Spine (Phila Pa 1976). 2014 Jun 1;39(13):1004-9. doi: 10.1097/BRS.0000000000000351.【原文下载】
作者:伊文
版权声明:
本网站所有注明“来源:梅斯医学”或“来源:MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明“来源:梅斯医学”。其它来源的文章系转载文章,本网所有转载文章系出于传递更多信息之目的,转载内容不代表本站立场。不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言



#Spine#
49
#辐射暴露#
52
#腰椎#
44
#3D#
46
#辐射#
35